UG Individual Projects – 6CCE3EEP
RADLab – Reconfigurable and Adaptive Designs Lab
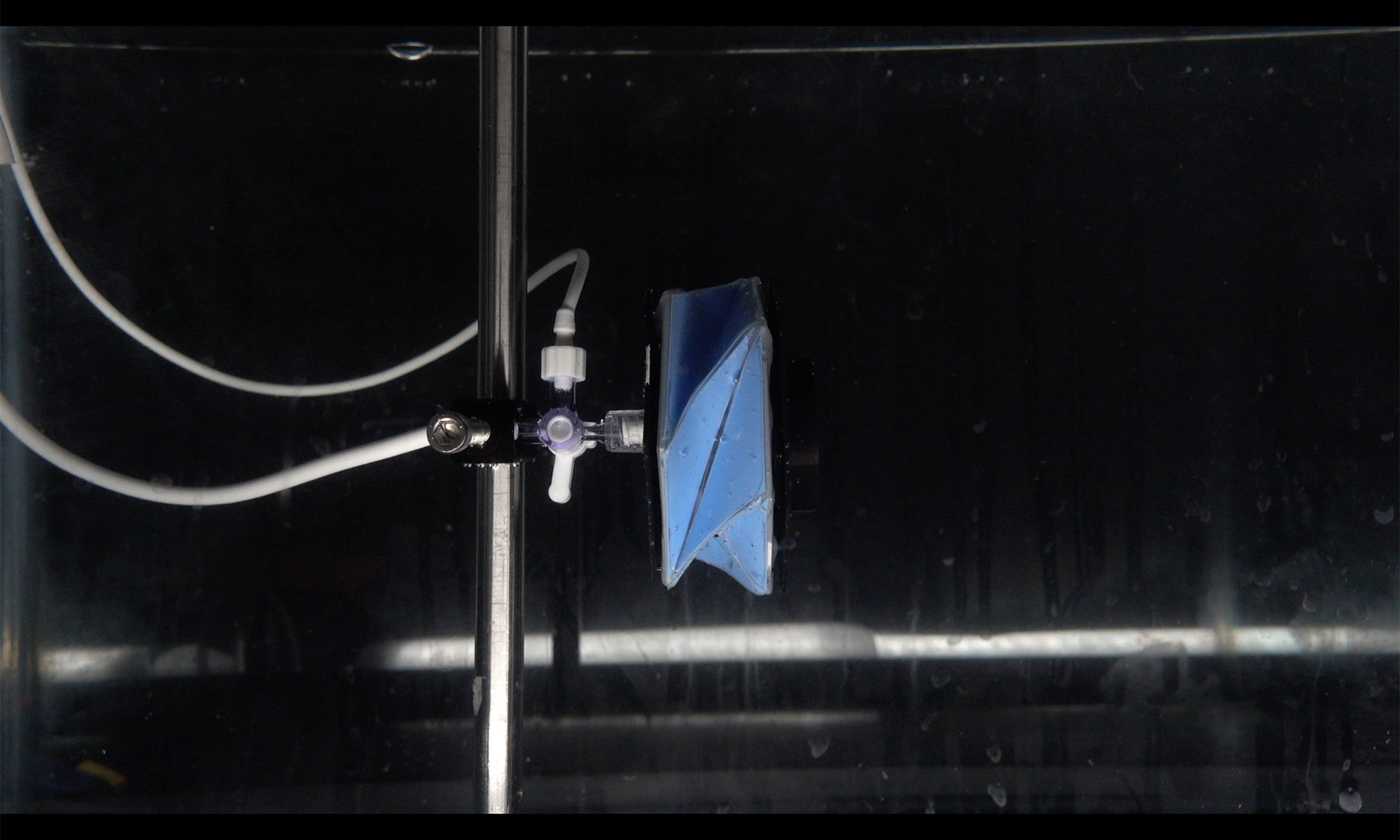
RAD_1, A & B – Origami modules
Modular robots are the new frontier of Robotics. They can combine together, deliver complex tasks and disassemble to their initial cells. Origami is one of the platform that scientists are currently exploring to realize these robots. Origami is the art of paper folding, which is often associated with Japanese culture. In the realm of structures, an Origami is generally something that occupies a very small amount of space but at the same time deploy on-command to perform a certain task. Like shown in the video on the side, an origami structure/robot is created when a solid cell is linked to another via rotational or flexible hinges. The question here is: how do we remove the human intervention and create cells that can connect together autonomously to create a more complex robot?
There are 2 openings for this project. Option A will employ a triangular cell, while option B will use a square cell. For both options the project will entail:
1. Using CAD tools to design a custom unit cell housing magnets and motors. This will be able to couple with other cells and actuate globally. 2. Investigate the method of manufacture the cell on campus, with the tools available (laser cutters/3D printer/Lego etc) 3. Determine an actuation strategy for both the single cell and a cluster of cells.
For more information come find me in my office (S1.26) on Tuesday 27th between 12:00 and 12:30.
RAD_2, A & B – Everting Robots
Everting robots are an interesting new way to achieve locomotion by literally turning the robot itself inside out. The first everting robot was the “vine robot”, invented by Prof. Okamura at Stanford University, a robot that grows like a vine. This robot’s ability to grow across distances without moving its whole body make it useful in search and rescue and medical applications. Recently, researchers have managed to detach the robot from its pressure source and make a model that is “untethered”.
There are 2 openings for this project.
For option A the project will entail:
1. Using CAD tools to design a novel everting device based on the one shown in the second video on the left hand side, which will make the untethered robot steer in addition to moving on a straight line. 2. Build the everting mechanism on campus, with the tools available (laser cutters/3D printer/Lego etc) 3. Implement a wireless control for the device.
For option B the project will entail:
1. Design inflatable pouches in the plastic skin of the robot, to create a novel type of locomotion using pressurized air. 2. Build a prototype on campus, with the tools available (laser cutters/3D printer/Lego etc) 3. Implement an inflating sequence to create locomotion
For more information come find me in my office (S1.26) on Tuesday 27th between 12:30 and 1:00pm.
RAD_3, A & B – Tensegrity
Tensegrity, tensional integrity or floating compression is a structural principle based on a system of isolated components under compression inside a network of continuous tension. The compressed members (usually bars or struts) do not touch each other. The prestressed tensioned members (usually cables or tendons) delineate the system spatially. All together it is an interconnected structure that works biologically like muscles and bones, where one element strengthens the other.
The term was coined by Buckminster Fuller in the 1960s as a portmanteau of “tensional integrity”. The other denomination of tensegrity, floating compression, was used mainly by the constructivist artist Kenneth Snelson.
There are 2 openings for this project.
For option A the project will entail:
1. Understand the geometrical pattern behind the construction of a tensegrity spherical structure and create a wiki on how to make a N-members tensegrity ball with simple components. 2. Build the structure on campus, with the tools available (laser cutters/3D printer/Lego etc) 3. Actuate the structure using the shortening of either the bars or the cables, in order to create locomotion.
For option B the project will entail:
1. Understand the geometrical pattern behind the construction of a tensegrity bridge structure and create a wiki on how to make a N-members tensegrity bridge with simple components. 2. Build the structure on campus, with the tools available (laser cutters/3D printer/Lego etc). 3. Compose different structures to create a tensegrity hand and actuate it by using cables in order to grasp objects.
For more information come find me in my office (S1.26) on Wednesday 28th between 14:00 and 14:30.
RAD_4, A, B, C & D – Topologically Optimized Structures
Topology optimization is a method that optimizes the geometry of an object based on the forces/stresses that object will withstand. This techniques is used to create “natural” designs and to save material by making structures lightweight.
There are 4 openings for this project. Each student will have to design an object with the function of supporting a weight. The four objects must be different from each other and must be approved by the supervisor. Examples are: shelf brackets, laptop stands etc.
For all options the project will entail:
1. Using CAD tools to design the object and optimize its geometry through he Fusion 360 Topological Optimization capabilities. 2. Simulate the object under the required and realistic load using FEA via the Abaqus software. 3. Manufacture the object on campus, with the tools available. 4. Test the deformation of the object with real-life experiments and compare the results with those provide by the FEA model.
For more information come find me in my office (S1.26) on Wednesday 28th between 14:30 and 15:00.